-
网站客服咨询客服1
-
服务热线:
021-20919220 -

网站客服咨询客服1
服务热线:
021-20919220
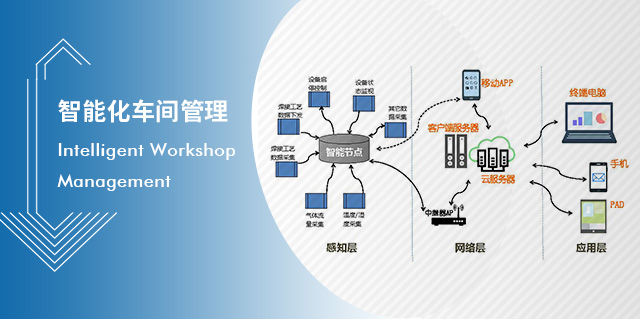
随着现代化工业的发展,工业机器人的研究和应用得到了迅猛的发展,焊接、切割、喷涂、激光融覆和 3D 打印等已成为工业机器人的主要应用领域。市场的波动以及市场对产品多样化的要求使机械制造行业面临品种多、批量改型快的局面,为具有一定柔性的工业机器人提供了极好的发展机会。
目前,工业机器人的工作方式主要采用示教再现的方式,这种工作方式对于工作任务不复杂,示教时间相对于工作时间较短的情况是非常有效的,但是在复杂的作业应用中,效果却不令人满意,示教再现的方式主要存在如下的缺点:
(1)示教再现无法实现 CAM;
(2)复杂的机器人作业,如弧焊、切割、喷涂、激光融覆和 3D 打印等复杂任务很难采用示教的方式完成;
(3)机器人示教时不是生产性的,任务一旦改变则要重新编程,不适合现阶段小批量和多品种的柔性生产需求。
IROPS 离线编程仿真软件为上述问题提供了解决方案。机器人离线编程技术是机器人编程语言的拓广,它利用计算机图形学的成果,建立起机器人及其工作环境的模型,在利用相关的规划算法,通过对图形的控制和操作,在不使用实际机器人的情况下进行轨迹规划,进而产生机器人的后处理程序。机器人离线编程是以 CAD 技术和图形仿真技术为基础,其中 CAD 技术用于在计算机中建立机器人工作单元的几何模型,为离线编程提供虚拟的编程环境,图形仿真技术用于检验离线编程的正确性。
IROPS 离线编程技术的主要技术优点如下:
(1)减少机器人的示教时间;
(2)改善了机器人的编程环境;
(3)提高了机器人的编程效率和质量;
(4)便于和 CAD 系统集成,实现 CAD/CAM 一体化。
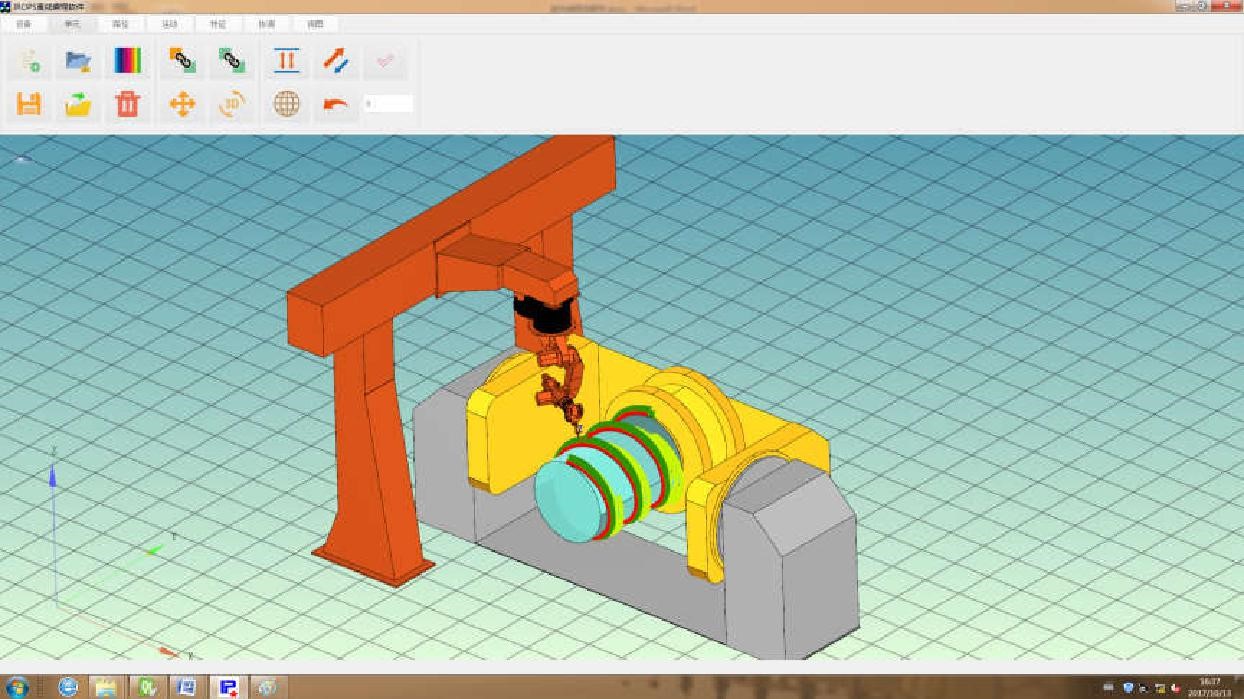
本软件采用 OpenGL 技术和 QT4.8.6 平台进行开发,在使用过程中可以配合 SolidWorks 等三维机械设计软件。软件的主要用途是对机器人在焊接、切割和喷 涂等领域中的工作轨迹进行路径规划,生成机器人控制器能够执行的后处理程序,并下载给机器人控制器。同时可以通过软件的仿真环境对机器人、变位机、工件、夹具以及生产线设备进行建模和运动仿真,重现机器人工作过程及生成现场的运动仿真环境。
IROPS 离线编程软件的主要结构包括设备建模、单元布局、路径规划、运动控制等功能模块,能够实现完成从设备与工件建模到运动仿真的过程,并通过软件的后处理功能生成机器人的执行程序。本软件的特色在于机器人放置规划技术、路径规划技术、工件用户坐标系标定技术以及对复杂曲线路径的离线编程,能够实现机器人生产线的离线编程和运动仿真,实现机器人在工业生成中的应用。
本软件运行可靠、操作简单、实用性强、适用于机器人焊接、切割、喷涂、激光融覆和 3D 打印等工业现场应用,同时也适用于高等院校和科研院所的机器人研究工作。
软件基本功能的使用说明
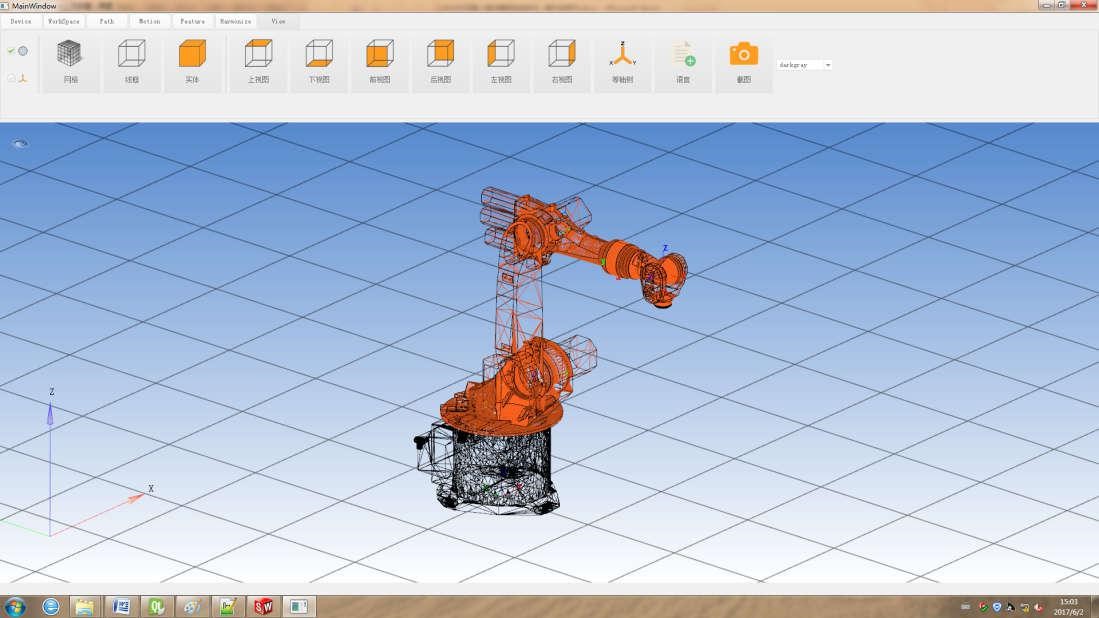
IROPS 离线编程软件总体界面如图 -1 所示,软件主要由设备、单元、路径、运动、协调和视图等模块组成。下面分别对软件的各个模块做详细的介绍。

图 -1 IROPS 离线编程软件总体界面
1.1 Device 模块
Device 模块的主要功能是将SolidWorks 等三维建模软件绘制的IGES 模型文件转换成格式为(.part)的零件,在将各个零件进行装配和属性定义。最后,保存成格式为(.dev)的设备文件,并根据设备的不同类型分为机器人、工件、工具、变位机和导轨。
1.1.1 创建设备
IGES 格式的模型文件加载到软件中,分别对每个模型进行属性定义,并保存成 part 格式的零件,在将 part 零件导入到软件中进行装配,定义设备属性和机器人的运动学杆件参数。最后,保存成 dev 格式的设备文件,以后打开设备只需要载入这个 dev 文件即可。
注意:由于在本软件中将设备类型分为机器人、变位机、工件、工具和导轨。所以在保存设备时,要注意选择保存设备的类型。
1.1.2 零件属性定义
零件的属性主要包含零件的材质、零件的旋转范围、零件的原点位置和零件旋转轴的方向。在保存零件前,要对零件的属性进行定义。
保存完的 part 格式的机器人零件要进行装配,机器人一般由 1 个基座和 6 个运动杆件组成,在装配过程中一般采用同轴心装配;如果零件间的装配方向有误可以点击反向配合按钮调整零件的装配方向;如果装配顺序错误可点击取消配合按钮,两个零件装配好后点击执行按钮。
1.1.4 零件的移动和旋转
在设备装配的过程中,被载入的零件初始位置一般位于原点位置,所以需要对零件的位置进行调整。零件的移动和旋转功能能够更便捷的完成设备的装配。
1.1.5 设备的运动学属性定义
当机器人各个杆件装配完成后,要定义机器人的运动学杆件参数。
1.2 WorkSpace 模块
WorkSpace 主要的功能是创建一个包含机器人、工件、工具、变位机和导轨等在内的机器人工作单元。在创建工作单元之前,应当已经完成了所有设备的创建,每个设备各自对应一个 dev 设备文件。在进行工作单元布局时,首先利用软件系统提供的功能完成载入设备、连接设备、设备位姿调整等工作,然后利用“保存工作单元”功能将布置好的工作单元保存到 wsp 工作单元文件中,下次在打开这个 wsp 文件,即可打开之前保存好的工作单元。
1.2.1 加载设备
将创建好的设备文件(dev)载入到工作单元中进行单元布局。
1.2.2 连接设备
焊枪等工具需要连接在机器人的末端关节,在其运动过程中,主设备会带动从设备一起协调运动,这就需要对两个设备进行连接,并对其主从关系进行定义。
1.2.3 取消设备连接
如果以定义好的设备间的连接关系存在问题,则可以取消连接定义。
1.2.4 合并设备
如果机器人和变位机,机器人和导轨之间存在协调运动的关系时,这时变位机和导轨的自由度则不再被各自设备对象所控制,而是作为机器人的外部扩展轴由机器人来控制。为此需要将上述设备的自由度合并到机器人设备当中,合并后机器人作为主设备,变位机或导轨作次设备。注意,一旦设备合并操作完成,则不能够取消。
1.2.5 删除设备
删除已经载入的设备。
1.2.6 移动和旋转设备
调整载入设备的位姿关系,被载入设备的初始位置都位于工作单元的原点处,需要将其调整到正确的位置。如果设备间需要连接或合并,可先进行连接和合并,然后在对设备的位姿进行调整。
1.2.6.1 移动或旋转设备窗口
在移动或旋转设备前先选择需要移动或旋转的设备,然后再根据实际需要在 X,Y,Z 三个水平方向移动。
1.2.7 设备间的配合
在进行工作单元布局时,设备之间一般存在一定的位置关系,为了满足这一需求,可以选取连个设备的平行面进行面配合,设备间的距离可根据实际需求进行调整。
1.2.8 保存工作单元
可以在完成载入设备操作后的任意时刻,对定义的工作单元进行保存。工作单元被保存成 wsp 的格式文件,下次打开这个 wsp 文件,即可载入保存的工作单元。
1.3 Path 模块
Path 模块主要是负责对待加工的工件进行路径规划,其主要功能包括路径的创建、保存、修改以及对路径上各个标签点的平移和旋转操作。在机器人仿真运动过程中,机器人会按照在工件上规划的路径轨迹进行运行。
1.3.1 创建路径
路径依附在工件设备上,要想控制机器人沿路径上标签点运动必须首先在工件设备上创建路径。点击新建路径按钮,用鼠标在工件上选择需要规划的路径轨迹,然后输入插补点数。
1.3.2 移动标签点
该功能主要用于调整路径上标签点的空间位置姿态。调整后要注意保存工作单元,以确保系统对标签点数据的更改。
1.3.2.1 平移标签点
将选中的标签点分别沿 X,Y,Z 三个反向水平移动,移动的步长可根据需求手动输入。
1.3.2.2 旋转标签点
将选中的标签点分别沿 X,Y,Z 三个方向旋转,旋转的步长可根据需求手动输入。
1.3.2.3 反转标签点
将选中的标签点分别按照 X,Y,Z 三个方向进行反转。
1.3.3 反转路径
一般路径上标签点的 X 轴方向为焊枪的前进方向,如果生成的标签点 X 轴方向和预想的方向相反,利用这个功能将 X 轴方向调整 180 度。
1.3.4 合并路径
将工件上两条路径合并成一条路径,合并后两条路径上的标签点序号也将重新排序。
1.3.5 控制显示
如果路径上的标签点个数较多,则可对路径进行隐藏。
1.3.6 路径及标签点的删除
1.3.6.1 删除标签点
选择路径上的某一标签点,将其删除。
1.3.6.2 删除路径
将选择的整条路径上的标签点都删除。
1.4 Motion 模块
Motion 模块主要负责机器人的运动仿真相关的功能,其中包括机器人关节运动、协调运动、机器人后处理程序和机器人末端 TCP 的定义等功能。
1.4.1 机器人速度和加速度
该窗口通过修改机器人的速度和加速来调整机器人在仿真过程中的运动速度。机器人的速度可根据不同工艺来进行调整。
1.4.2 机器人末端 TCP 参数定义
机器人末端 TCP 参数窗口,该窗口通过修改机器人末端 TCP 参数来调整机器人的末端姿态。其中,X、Y、Z 是 TCP 水平方向的位移;
1.4.3 机器人运动控制
机器人运动控制窗口,该窗口可通过调整机器人各个关节的角度来调整机器人的姿态,机器人关节的运动步长分为 10、1、0.1 可供选择。在机器人运动的过程中,当某一个关节超出机器人的最大限位,该关节会高亮报警,关节的颜色会发生变化以提示操作者。
1.4.4 沿 TCP 移动
TCP 是固连在机器人工具末端的坐标系,由机器人的正运动学计算结果乘以 TCP 矩阵得到。控制设备工具的末端沿着TCP 坐标系的三个坐标轴方向移动时,
需要进行逆运动学计算,所以只有机器人设备可以使用此功能。在执行此功能时,会给出 TCP 坐标系的图形显示。
1.4.5 沿 TCP 旋转
TCP 平移功能类似,执行此操作时,机器人末端工具的空间位置不变,工具末端绕着 TCP 坐标系的指定轴进行旋转。
1.4.6 自动编程
在进行自动编程之前,确保工件上的路径被选中,机器人相关的运动参数以经设定;如果有变位机,则还需要设定变位机的相关参数。机器人的运动方式默认为直线插补,机器人根据路径上标签点的位置姿态矩阵按照机器人逆运动学算法进行计算,求取每一时刻机器人的各个关节值。
1.4.7 仿真运动
根据自动编程后计算的结果,机器人开始进行仿真运动,机器人会按照之前规划的路径轨迹按标签点序号的顺序进行运动。如果工作单元中有变位机,机器人则会和变位机进行协调运动,机器人在运动过程中,如果出现关节限位或发生碰撞的情况,界面会有报警提示,并且超限的关节会有红色高亮显示。
1.4.8 后处理程序
机器人仿真运动结束后,可以按照不同机器人的品牌和型号进行后处理程序的编程。本软件目前支持安川机器人(DX200 系列)进而库卡机器人(KRC4系列)。
1.5 Harmonize 模块
在机器人和变位机进行协调运动时,在协调运动算法中,需要知道变位机杆件参数及杆件的数量,还需要对变位机的协调运动开关进行控制,对机器人的焊接方式进行设定。
1.5.1 变位机参数设定
为变位机参数设定窗口。
1.5.1.1 变位机状态
对是否进行变位机和机器人的协调运动进行设定。
1.5.1.2 外部轴数量
设定变位机和机器人协调运动的外部轴数量,目前最多可扩展为两轴协调。
1.5.1.3 焊接方式
对变位机进行焊缝点变位的方位进行设定,一般采用船型焊方式。
1.5.1.4 求解原则
设定变位机逆运动学的求解原则。
1.6 View 模块
View 模块主要是对软件的图形操作界面的设置,其中包括视图方向的设置、渲染方式的设置、语言设置和截图等功能。
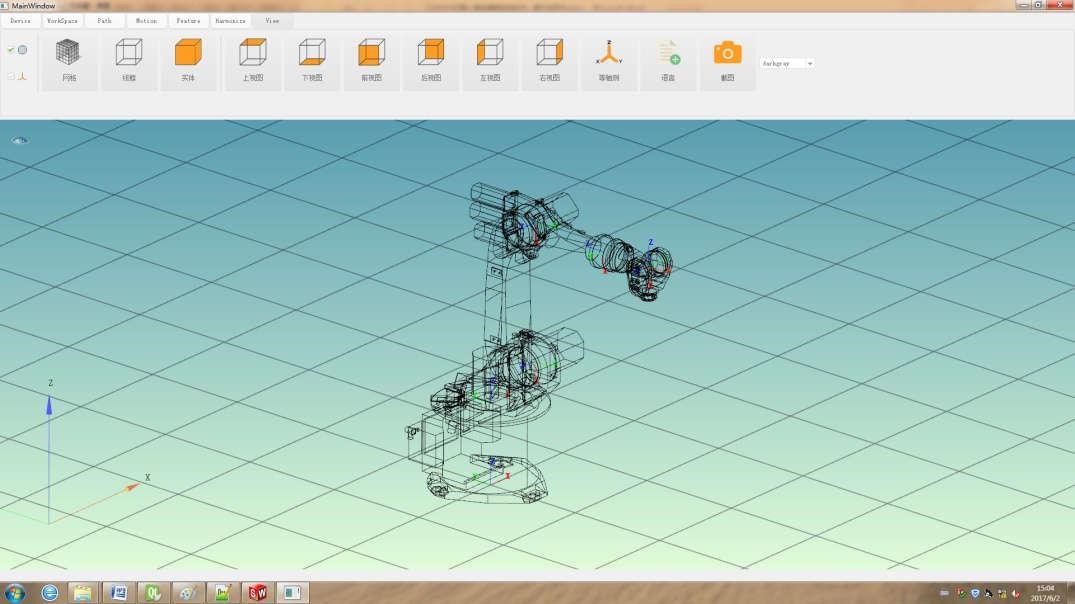
1.6.1 渲染方式
软件中设备的默认渲染方式为实体模式,在操作过程中还可以将软件的渲染方式改为网格模式和线框模式。
1.6.2 视图方向
软件中默认的视图方向为前视图,还可根据需求调整为上视图、下视图、后视图、左视图、右视图和等轴侧视图。
1.6.3 语言设置
软件语言为中文和英文两种模式,默认为中文模式。
1.6.4 屏幕截图
软件具备屏幕截图的功能,该功能可将整个工作单元界面进行截图,图片的格式默认为.jpg。
如需了解更详细的资料请与我们销售人员联系。
本软件运行可靠、操作简单、实用性强、适用于机器人焊接、切割、喷涂、激光融覆和 3D 打印等工业现场应用,同时也适用于高等院校和科研院所的机器人研究工作。
上海昊晟实业有限公司
SHANGHAI HAOSHENG INDUSTIAL CO., LTD.
联系人:颜经理 Contacts: Mr Yan
联系电话:13918850501 Mobile:13918850501
电话:021-20919220
地址:上海市浦东新区建豪路95号501室
Add.: Room 501 No. 95 Jianhao Road, Pudong New Area, Shanghai.
网址:www.haoshengshiye.com Web:www.haoshengshiye.com